

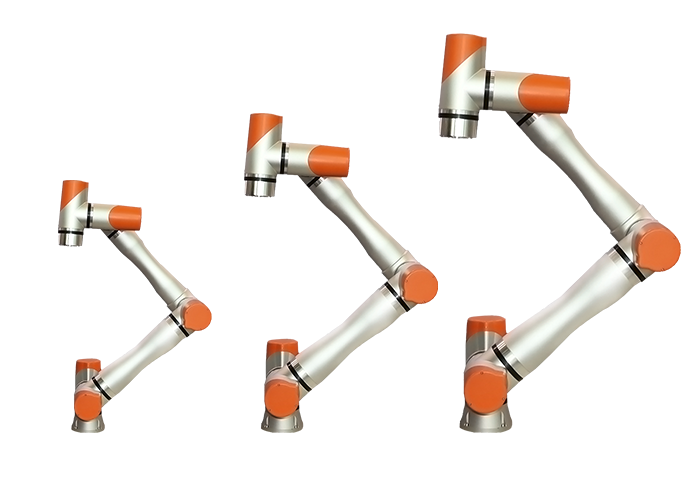





传感器是协作机器人关节模组的重要零部件,协作机器人传感器分为位置传感器和力扭矩传感器两大类,其中位置传感器又分为增量式传感器和绝对式传感器两大类。目前国内方面大部分厂商生产的协作机器人都不带关节力矩传感器。
位置传感器(尤其是绝对式传感器)对协作机器人的系统精度和重复定位精度起着至关重要的作用。当前国内外协作机器人厂商提供系统精度及重复定位精度都没有跳出UR协作机器人公司先前就已公布的技术指标,几乎都是重复定位精度为0.01-0.03mm,系统精度为0.1mm。由此可以看出这些世界级的机器人制造公司都没将关节元器件有机的融合在一起。
主要协作机器人产品精度指标对比(单位:mm)
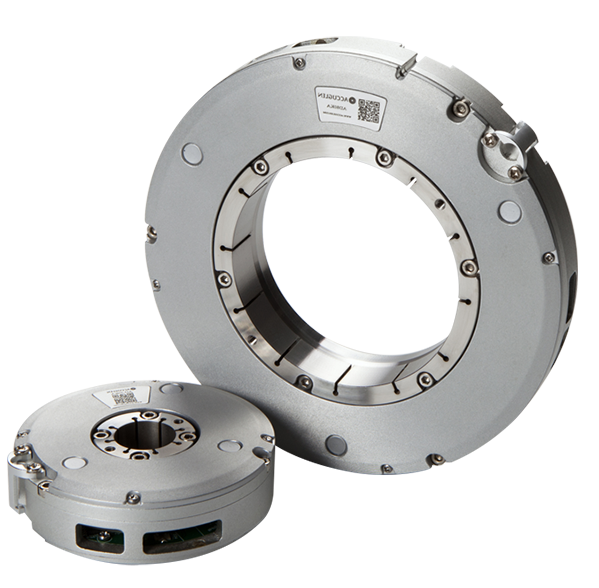
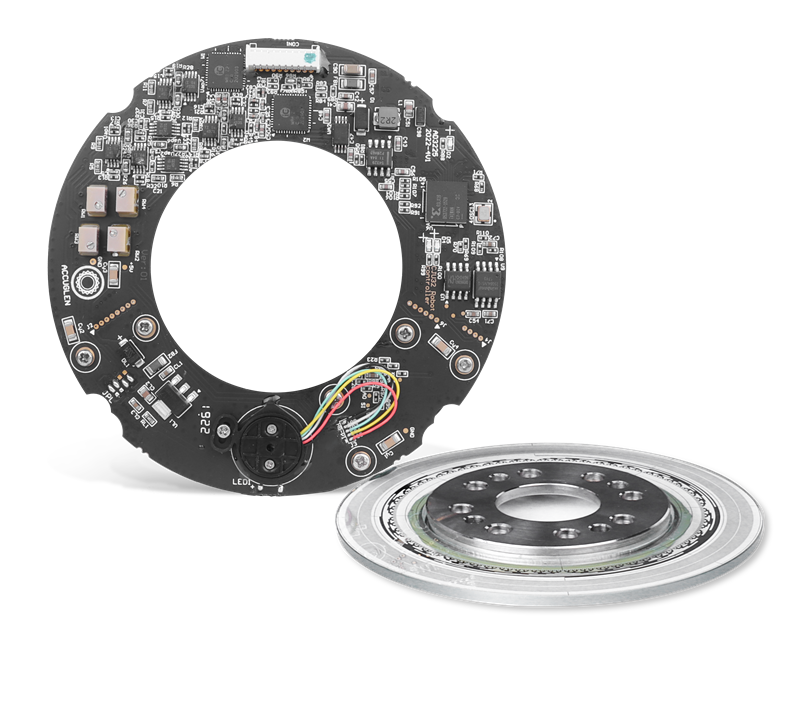
经调研,在2019年东京国际机器人展会上有五家公司展出机器人关节模组。其中三家是谐波减速机制造商,即日本哈默纳科、日本住友、中国苏州绿地;两家是传感器制造商,即日本尼康和中国广州凯发。这五家公司生产的关节模组的尺寸及重量基本都在相同的尺寸范围内,但各个公司公布的关节模组精度指标却由很大差别。五家企业具体关节模组精度指标如下:
5家企业关节模组精度指标对比(单位:”)
从各家公司公布的关节模组精度来看,广州凯发已经达到了超越了国外最高水平(尼康15")。高精度关节模组是高精度协作机器人的制造基础。据悉,使用广州凯发关节模组制造的协作机器人辅以后期的标定处理绝对有机会制造出系统精度0.01mm,重复定位精度0.003mm或系统精度0.05mm,重复定位精度0.005mm的协作机器人,将来有望成为世界上精度最高的协作机器人。广州市凯发是一家专业从事精密位置位移测量传感器及测量系统设计和制造的高新技术企业。公司主要研发生产角度编码器,产品广泛应用于工业机器人关节和精密机床。
